

Chapter 10 | Reading Collision Data
Introduction
In this chapter, we’ll review how to interpret collision data contained in the auto-ees and ees object data containers. To make the process straightforward, we’ll work through a simple collinear and inline impact case that can be easily compared to hand calculations.
Initial Set-up
Begin by setting up two vehicles in your Virtual CRASH environment. Press [P] to pause physics during initial set-up to make things a little easier.
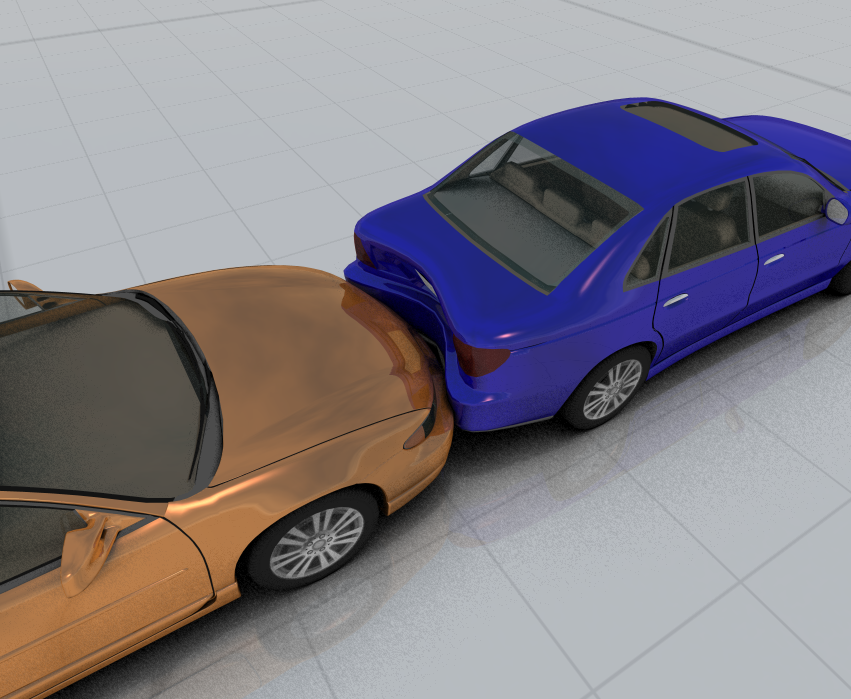
The figure below illustrates an inline collision between a Kia K5 (white) and a Lucid Air (brown). Both vehicles are positioned with a yaw orientation of 0 degrees and a y-coordinate of 0 feet.
Kia K5: placed at x = -20 feet
Lucid Air: placed at x = 0 feet
Initial speeds are defined as follows:
The Lucid travels at 5 mph as it approaches the stop sign.
The Kia travels at 20 mph from behind.
The simulation is staged on the x–y plane. No sequences have been added, so no additional lateral or longitudinal tire forces are introduced from driver inputs.
Press [P] again to unpause physics.
As you set the initial speeds for your vehicles, Virtual CRASH immediately updates the simulation to display the resulting motion. You can use the time slider in the lower-right corner of the screen to scroll backward or forward in time and focus on the moment of impact. Remember that Virtual CRASH is an impulse-momentum based simulator, which models impulses as being delivered instantaneously to objects during collisions.
The Auto-EES Data Container
Now that you’ve set up a collision, let’s take a look at the associated collision data. Left-click on “auto-ees” in the left-side control panel (see below). EES objects in this panel provide direct control over the inputs to the Kudlich-Slibar impulse-momentum model (see Appendix 1) and allow you to instantly collect results related to specific impulse exchanges.
Next, open the “defaults,” “misc,” and “selection” menus to display various auto-ees features. In the “selection” menu, left-click “previous contact” to select the impulse exchange. If the contact interaction between the vehicles required more than one impulse exchange to resolve, you can cycle through each exchange by using the “next contact” button. Below we used [Ctrl+1] to switch our display to Contours view mode.
In the “defaults” menu of the auto-ees object, you’ll find parameters that affect the calculations of all impulses in the auto-ees object. The main parameters are reviewed below.
Depth of Penetration
Impulse-based collision models such as Kudlich-Slibar do not rely on force–deflection relationships to resolve contact interactions. Instead, crush damage is represented through direct user input. The “depth of penetration” parameter effectively specifies the approximate total system crush. The depth of penetration, \(\Delta t_{p}\), is defined in the time domain. Starting from the initial contact time \(t_i\), the equal and opposite impulses are delivered to the vehicles at ( t_i + \Delta t_p \). The specific location of the impulse (force) centroid within each vehicle will be discussed later. For more information on depth of penetration, see this blog post.
Friction
The friction input value acts as a threshold. Kudlich-Slibar first solves for the impulse exchange required to bring the vehicles to a common velocity at the effective point of contact (impulse centroid). However, the tangential component of the resulting impulse vector cannot exceed the product of the input friction value and the normal impulse component. If the tangential impulse needed to fully satisfy the common-velocity condition is greater than this product, post-impact sliding contact will result. When physical evidence indicates post-impact sliding contact, lowering the friction input value can help ensure the simulation reflects this condition.
Restitution
Once the impulse calculation is completed to bring the vehicles to a common velocity and friction is accounted for, the impulse vector magnitude is increased by an amount proportional to restitution. This setting specifies the coefficient of restitution used by the collision model, with values ranging from -1 to 1. A value of 0 corresponds to a fully inelastic collision where all available collision energy is lost to inelastic effects, while a value of 1 generally corresponds to a perfectly elastic collision with no energy loss (subject to frictional effects). Negative values represent cases where the contact surfaces do not reach a common velocity, such as when components break off at the area of contact during the collision. In most vehicle collisions, realistic values typically fall between 0 and 0.5.
Pitch
Under “pitch” you will see the pitch angle of the normal axis of the collision model. This can be useful in cases of extreme front-end underride.
Selecting an Impulse Exchange
Use the “previous contact” and “next contact” buttons in the “selection” menu to cycle through the impulse exchanges within a contact interaction, or across multiple contact interactions.
Once you press “next contact,” the user environment will display the impulse vectors, the friction cones (blue), and the plane orthogonal to the normal collision axis (red). The left-side control panel will also show detailed data summarizing the collision event (see below). The tangent impulse component lies within the red friction plane. The friction cone represents the upper limit of the volume in which the impulse vector must fall for the collision. If an impulse vector lies on the surface of the cone, the tangent component may be at its upper limit, which can imply post-impact sliding motion. As the maximum coefficient of friction allowed in the simulation is reduced, the cone decreases in size, showing that the allowable volume is also reduced. In the extreme case where the coefficient of friction is set to 0, the cone collapses to a line along the normal axis projection, meaning only normal impulse components act on the vehicles.
Under “contact” you will see the magnitude of the impulse delivered to each vehicle during this event as well as the total energy lost.
Under the “defaults” section, you will find the user adjustable parameters used by the collision model. These were discussed previously above.
Left click on “object 1” and “object 2” in the left control panel to reveal the resulting values associated with this collision event.
Next, expand “position-local” and “rotation-local” to see the position of the impulse centroid and the impulse normal axis orientation.
User Defined Contacts
Scroll to the bottom of the auto-ees menu in the left side control panel. Now, left click on “create user contact.” By creating a user contact, you can modify the inputs to the collision model for this event.
Simulated Vehicle Deformation
Next, make sure your new “ees” object is selected, and scroll to the top of the new user created ees menu in the left side control panel (see below). There you will see the “deform” option disabled. Left click the box to the left of “deform” to enable simulated deformation.
Adjust Impulse Centroid Position
Now we are going to customize our impulse centroid position. This is the position in three-dimensional space at which the equal and opposite impulse vectors act on each vehicle. Click on the box to the left of “auto-position” to disable automatic positioning of the impulse vectors (see below). When Virtual CRASH automatically sets the centroid positions, it uses the overlap of the vehicle bounding boxes at the instant of momentum exchange.
Scroll down to the bottom of the ees menu in the left control panel, and you should now see the position and orientation input controls.
Let’s now adjust the \(z\)-position of the impulse centroid. We are going to align this \(z\)-position with the vehicle centers-of-gravity in order to eliminate rotational effects from our simulation (by causing the lever-arms to have 0 length). Under “position-local”, set \(z\) = 1.772 feet:
Let’s shift the \(x\) position of the impulse centroid at \(x\) = 4 feet to simulate a case where the bullet vehicle’s front-end stiffness is much larger than the target rear-end vehicle’s stiffness. Now scroll up and set the “Depth of penetration” value to 0.06 seconds in order to exaggerate the crush damage. Note, by scrolling down the left side control panel, and left clicking on “timing,” you will see the time at which the vehicles begin to first come into contact.
As you advance your time slider forward, you’ll notice at time greater than 0.16 seconds (initial contact time) + 0.06 seconds (from depth of penetration setting), the impulses and crush damage will have been imparted to both vehicle shells.
Finally, scroll up and left click to expand “object 1” and “object 2” in the left side control panel to reveal the vehicle data for your collision event (see below). We will now analyze this data.
With this simple inline collision, let’s review the various outputs reported by the ees object.
Deformation Energy
For two vehicles undergoing a contact interaction via Kudlich–Slibar impulse exchange, the deformation energy is defined as the absolute value of the difference between the system’s final kinetic energy (just after impact) and initial kinetic energy (just prior to impact).
The system’s kinetic energy is the sum of translational and rotational kinetic energy terms for both vehicles:
$$ E_{Deformation} = |KE_f - KE_i| $$
Since there is no pre- or post-impact rotation in this inline collision example, we only need to consider translational kinetic energy.
$$ KE_{1,i} = {1 \over 2}\cdot (98.95~\text{slugs})\cdot(7.33~\text{ft/s})^2 = 2,660.54~\text{ft-lbs}$$
$$ KE_{1,f} = {1 \over 2}\cdot (98.95~\text{slugs})\cdot(20.84~\text{ft/s})^2 = 21,495.35~\text{ft-lbs}$$
$$ KE_{2,i} = {1 \over 2}\cdot (108.68~\text{slugs})\cdot(30.8~\text{ft/s})^2 = 51,547.04~\text{ft-lbs}$$
$$ KE_{2,f} = {1 \over 2}\cdot (108.68~\text{slugs})\cdot(18.5~\text{ft/s})^2 = 18,593.51~\text{ft-lbs}$$
Therefore:
$$ E_{Deformation} = |(21,495.35~\text{ft-lbs} + 18,593.51~\text{ft-lbs}) - (2,660.54~\text{ft-lbs} + 51,547.04~\text{ft-lbs})| $$
$$ E_{Deformation} = 14,117.73~\text{ft-lbs} \approx 19,141~\text{J}$$
The Impulse
The magnitude of the normal component of the impulse vector delivered to each vehicle can be estimated by:
$$ |\bar{J}\cdot\hat{n}| = (1+\varepsilon)\cdot\bar{m}\cdot |\bar{v}^P_{Rel,i}\cdot \hat{n}| $$
Plugging in our values, this is:
$$ \bar{J}\cdot\hat{n} = (1+0.1)\cdot (51.79~slugs) \cdot (23.467~ft/s) = 1336.89~lbs-s $$
Reading off the reported impulse from your left control panel, you will see a value of 5946.847 N-s = 1336.904 lbs-s, which is in excellent agreement with our hand calculation above.
Delta-V
This impulse can be related to the normal component change-in-velocity for each vehicle by:
$$ m_1 |\Delta \bar{v}_1 \cdot \hat{n} | = m_2 |\Delta \bar{v}_2 \cdot \hat{n} | = |\bar{J} \cdot \hat{n} | = (1 + \varepsilon)\cdot \bar{m}\cdot |\bar{v}^P_{Rel,i}\cdot\hat{n}| $$
In our current simulation, we can assume that \(\Delta \bar{v}_1\) and \(\Delta \bar{v}_2\) are perfectly aligned with the x-axis, therefore, for the Saturn we have:
$$ | \Delta \bar{v}_1 | = {|\bar{J}\cdot\hat{n}| \over m_1} = {1336.89~lbs-s \over 98.95~slugs}=9.21~mph $$
and for the Pontiac:
$$ | \Delta \bar{v}_2 | = {|\bar{J}\cdot\hat{n}| \over m_2} = {1336.89~lbs-s \over 108.68~slugs}=8.39~mph $$
Both of these estimates are in excellent agreement with the values displayed in the left side control panel.
Deformation
The deformation value for a given vehicle is determined by estimating the distance between the bounding box of the vehicle and the impulse centroid position, as measured along the normal collision axis. Initially, the damage centroid is automatically placed on the tangent plane, whose orientation will depend upon how the vehicle bounding boxes overlap. The overlap will directly depend on the depth of penetration time as well as the pre-impact orientations and positions of the vehicles. In our example, the auto-position feature of our ees object was disabled, so that we could move the centroid further into the Saturn’s rear. Thus, we should see a larger value for deformation for the Saturn compared to the Pontiac.
This is indeed what we see in our simulation, as the Pontiac has a deformation value of 0.059 feet and the Saturn has a deformation value of 1.396 feet.
Equivalent Energy Speed
Virtual CRASH defines the equivalent energy speed (EES) as given by Burg. Below we will give a short review. First, let’s suppose the total energy lost to deformation for each vehicle can be expressed by:
$$ E_{Loss,1} = {1 \over 2}\cdot | \langle \bar{F}_1 \cdot \hat{n} \rangle \cdot C_1 | = {1 \over 2}\cdot m_1 \cdot EES_1^2 $$
$$ E_{Loss,2} = {1 \over 2}\cdot | \langle \bar{F}_2 \cdot \hat{n} \rangle \cdot C_2 | = {1 \over 2}\cdot m_2 \cdot EES_2^2 $$
where \(\langle F_1 \cdot \hat{n} \rangle\) and \(\langle F_2 \cdot \hat{n} \rangle\) are the average normal projected forces on each vehicle, and \(C_1\) and \(C_2\) are the total deformation values for each vehicle. Let’s now assume Newton’s 3rd law implies:
$$ | \langle \bar{F}_1 \cdot \hat{n} \rangle | = | \langle \bar{F}_2 \cdot \hat{n} \rangle | $$
Using the above, this implies we can write the ratio:
$$ {EES_1 \over EES_2} = \sqrt{{m_2 \over m_1} \cdot {C_1 \over C_2}} $$
Let’s now express the total energy lost in the collision by the sum:
$$ E_{Loss} = E_{Loss,1}+E_{Loss,2} $$
which we can rewrite as:
$$ E_{Loss} = {1 \over 2} \cdot m_1 \cdot EES_1^2 + {1 \over 2} \cdot m_2 \cdot EES^2_2 $$
$$ E_{Loss} = {1 \over 2} \cdot m_1 \cdot \left(EES_2 \cdot \sqrt{{m_2 \over m_1} \cdot {C_1 \over C_2}} \right)^2 + {1 \over 2} \cdot m_2 \cdot EES^2_2 $$
$$ E_{Loss} = {1 \over 2}\cdot m_2 \cdot EES_2^2 \cdot \left(1+{C_1 \over C_2} \right) $$
Finally, we can solve for \(EES_2\):
$$ EES_2 = \sqrt{ {2E_{Loss} \over m_2 \cdot \left( 1 + {C_1 \over C_2} \right) } } $$
Once \(EES_2\) is obtained, \(EES_1\) can be obtained from the above relations.
Let us now see how our hand calculations compare with the values from Virtual CRASH. We solved for the total energy lost in the collision above. This gave us \(E_{Loss}\) = 14,117.73 ft-lbs. From our estimates of deformation above, we have \(C_1 =\) 1.396 ft and \(C_2 =\) 0.059 ft. Plugging in these values, we have:
$$ EES_2 = \sqrt{ {2\cdot\left(14,117.73~ft-lbs\right) \over \left(108.68~slugs\right) \cdot \left( 1 + {1.396~ft \over 0.059~ft} \right) } } = 2.213~mph $$
With this, we can solve for \(EES_1\):
$$ EES_1 = EES_2 \cdot \sqrt{{m_2 \over m_1 }\cdot {C_1 \over C_2}} $$
$$ EES_1 = \left(2.213~mph\right) \cdot \sqrt{{108.68~slugs \over 98.95~slugs}\cdot{1.396~ft \over 0.059~ft}} = 11.281~mph $$
Both of these are in excellent agreement with the values shown in the left control panel.
Objects connected by joints
The Kudlich-Slibar model is used automatically for collisions between simulated vehicle objects. When vehicles are coupled by joints to other simulated objects, such as objects connected by the rope tool, or tractors being coupled to trailers, care must be taken to obtain estimates for Delta-V values. This is because the Kudlich-Slibar model will impart impulses between objects directly undergoing contact ignoring the effect of joint coupling, and joint coupling forces will be accounted for after the initial Kudlich-Slibar calculation. This means the Delta-V value displayed in the EES object for a joint coupled vehicle undergoing contact with another vehicle will not account for the additional effective mass of the connected object. In these cases, it is best to obtain cumulative Delta-V values either from the diagram tool, dynamics report data, or the dynamics info tool.
Tags: DeltaV, Delta-V, DV, dV, restitution, epsilon, coefficient of restitution, impulse centroid, EES, equivalent energy speed, auto-ees, contact.
© 2024 Virtual CRASH, LLC. All Rights Reserved